A graph in data structures G consists of two things:
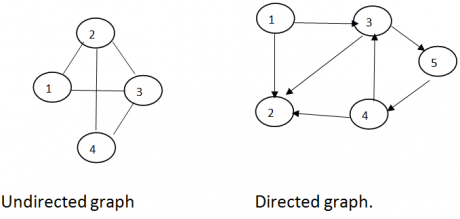 G=(V,E) G=(V,E) V={1, 2, 3, 4} V={1, 2, 3, 4, 5} E={(1,2);(2,3);(2,4);(3,4);(1,3)} E={(1,2) (1,3) (3,2) (3,5) (3,4) (4,2) (5, 4)} Suppose e=[u,v] then the nodes u and v are called the end points of e ,and u and v are said to be adjacent nodes or neighbors. An edge with an orientation is a directed edge while an edge with no orientation is an undirected edge. The undirected edges (i,j) and (j,i) are the same; the directed edge(i,j) is different from the directed edge(j,i). If all the edges in a graph are undirected, then the graph is undirected graph. The graphs of figure(a) and are undirected graphs. If all the edges are directed , then the graph is directed graph. The graph of figure(b) is a directed graph. Often an undirected graph is a simply called a graph and a directed graph is called a digraph. In some applications of graphs and graphs we shall assign a weight or cost to each edge, when weights have been assigned to edges we use the terms weighted graph and weighted digraph. To refer to the resulting data object the term network refers to a weighted graph or digraph. Example:
G=(V,E) G=(V,E) V={1, 2, 3, 4} V={1, 2, 3, 4, 5} E={(1,2);(2,3);(2,4);(3,4);(1,3)} E={(1,2) (1,3) (3,2) (3,5) (3,4) (4,2) (5, 4)} Suppose e=[u,v] then the nodes u and v are called the end points of e ,and u and v are said to be adjacent nodes or neighbors. An edge with an orientation is a directed edge while an edge with no orientation is an undirected edge. The undirected edges (i,j) and (j,i) are the same; the directed edge(i,j) is different from the directed edge(j,i). If all the edges in a graph are undirected, then the graph is undirected graph. The graphs of figure(a) and are undirected graphs. If all the edges are directed , then the graph is directed graph. The graph of figure(b) is a directed graph. Often an undirected graph is a simply called a graph and a directed graph is called a digraph. In some applications of graphs and graphs we shall assign a weight or cost to each edge, when weights have been assigned to edges we use the terms weighted graph and weighted digraph. To refer to the resulting data object the term network refers to a weighted graph or digraph. Example: 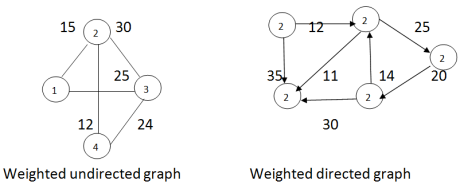
The most frequently used representation schemes for graphs and digraphs are adjacently based adjacency matrices and linked adjacency list.
The adjacency matrix of an n-vertex graph G=(V,E) is an nXn matrix A, each element of A is either zero or one .We shall assume that V={1, 2, 3, . . . . . n}.If G is a graph, then the elements of A are defined as follows. 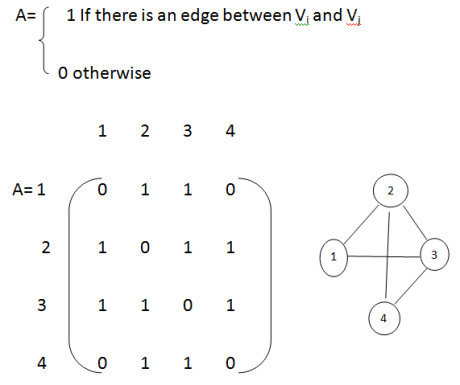
In the case of linked adjacency lists, let G be a graph with m nodes. The array representation of G in memory i.e., the representation of G by its adjacency matrix A has a number of major drawbacks. Consider the graph G in figure (a).The table shows each node in G followed by its adjacency list, which it its list of adjacent nodes also called its successors or neighbours.Figure represents a schematic diagram of linked representation of G in memory specifically, the linked representation will contain two lists (or files), a node list NODE and edge list EDGE. 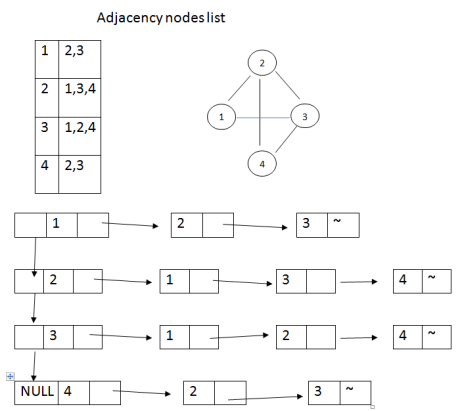
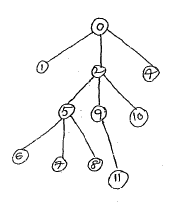
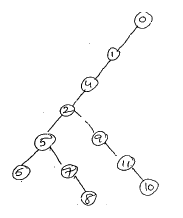
Many graph algorithms require one of systematically examine the nodes and edges of graph G. There are two standard ways that this is done one way is called a breadth first search and the other is called a depth- first search. The breadth – first search will use a queue as an auxiliary structure to hold nodes for future processing and analogously .The depth –first search will use a stack.
A data structure queue is used to place all waiting nodes. This queue is also convenient to keep the track of nodes that are already.
In the depth –first search traversal, we back track on a path once it reached the end of the path. We consider the data structure stack instead of a queue as in breadth first search.
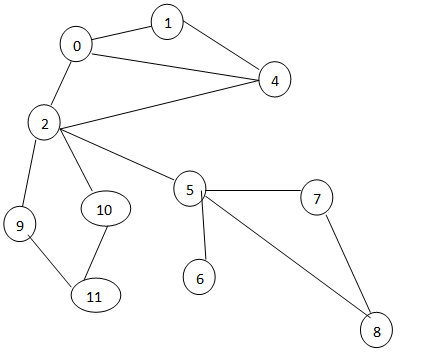
| 1 | 1,2,4 |
| 2 | 0,4 |
| 3 | 0,4,5,9,10 |
| 4 | 0,1,2 |
| 5 | 2,6,7,8 |
| 6 | 5 |
| 7 | 5,8 |
| 8 | 5,7 |
| 9 | 2,11 |
| 10 | 2,11 |
| 11 | 9,10 |

| 0 | 1,2,4 |
| 1 | 0,4 |
| 2 | 0,4,5,9,10 |
| 4 | 0,1,2 |
| 5 | 2,6,7,8 |
| 6 | 5 |
| 7 | 5,8 |
| 8 | 5,7 |
| 9 | 2,11 |
| 10 | 2,11 |
You liked the article?
Like: 0
Vote for difficulty
Current difficulty (Avg): Medium

TekSlate is the best online training provider in delivering world-class IT skills to individuals and corporates from all parts of the globe. We are proven experts in accumulating every need of an IT skills upgrade aspirant and have delivered excellent services. We aim to bring you all the essentials to learn and master new technologies in the market with our articles, blogs, and videos. Build your career success with us, enhancing most in-demand skills in the market.

